
[ad_1]
Jeff Cardenas pulls out his MacBook. Apptronik’s co-founder and CEO has a slideshow he wants to show, running down the Austin startup’s seven-year history. It does, indeed, take a bit of contextualizing. Like many fellow robotics firms, the company was fueled by government contracts in its earliest days.
First up was Valkyrie 2, the second iteration of NASA’s humanoid space robot. The young company was one of a handful tasked with helping to bring that system to life. Its contribution to the puzzle was liquid-cooled robotic actuators developed at the Human Centered Robots lab at the University of Texas, led by Apptronik co-founder and chief scientist Luis Sentis.
Next was exoskeletons. United States Special Operations Command (USSOCOM), which was in the market for “iron man suits.”
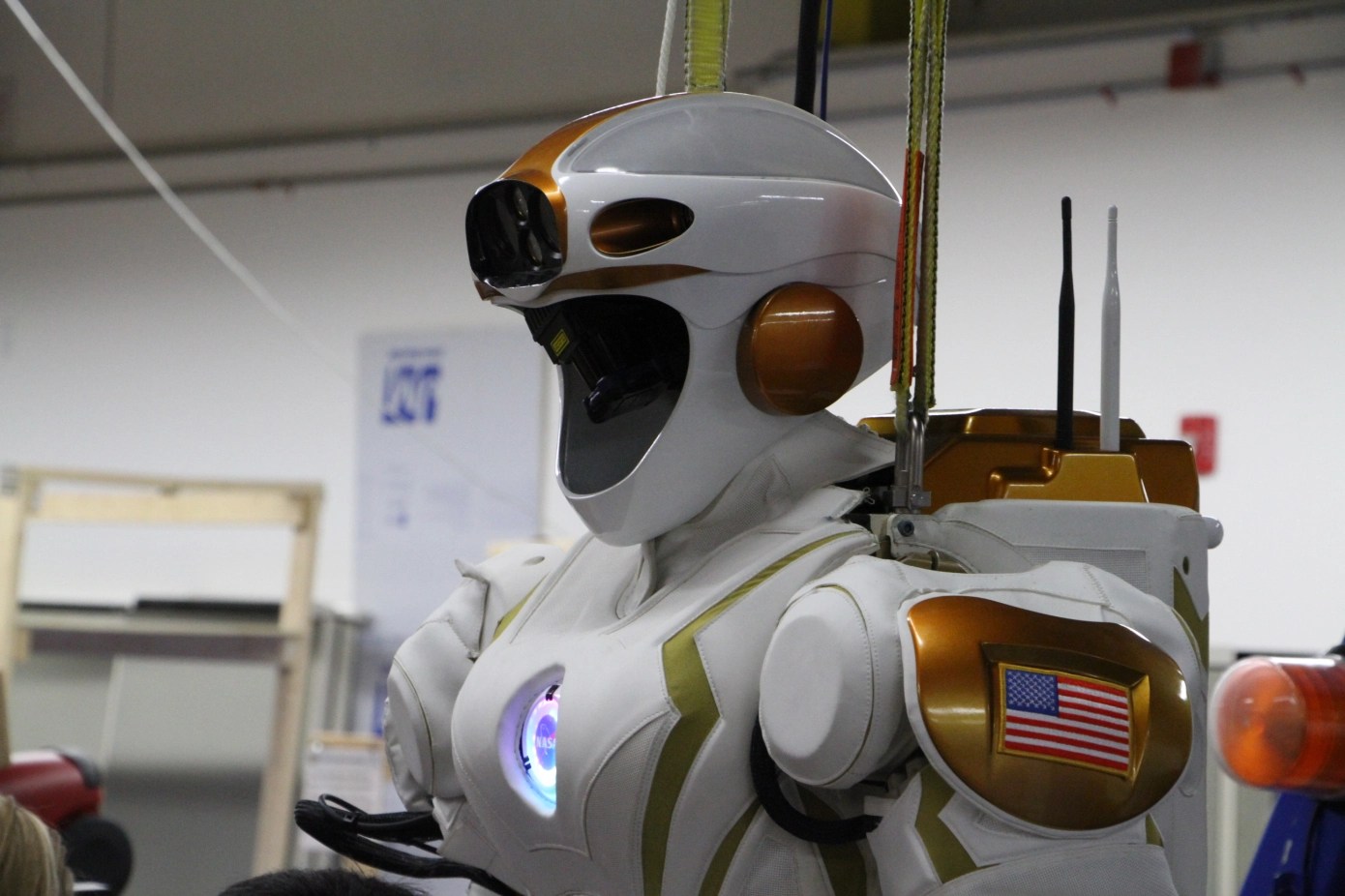
Image Credits: Brian Heater
“[The]exoskeleton was liquid cooled,” says Cardenas. “We learned a lot doing that. The complexity of the system was too high. It was heavy. We remotized all of the actuators. And then we started to realize what was the simplest version of a humanoid robot: a mobile manipulator. We started getting approached by a lot folks in logistics, who didn’t want to pay for manufacturing arms. They were too precise for what they need. What they wanted was an affordable robotic logistics arm.”
Industrial arms have far and away been the tip of the spear, having existed for roughly 60 years. In that time, manufacturers like Fanuc and Kuka have engineered millimeter accuracy. That’s something that is essential for manufacturing and overkill for most logistics work. Installing electrical systems in cars, for instance, requires a lot more precision than moving a box from point a to point b.
“What a lot of people are doing in humanoid robots is basically trying to build them the same way that we’ve built industrial robotic arms for a long time,” says Cardenas. “One of the key ideas for Apptronik is the way we need to build these robots — when you have a 30-degree of freedom system — is fundamentally different. The things we need are different. We need them to be safe around humans, we need them to be highly robust to the environment they’re around. We need them to be highly energy efficient. It’s a new set of constraints we’re trying to optimize for. Taking the same architectures of all the arms that you see out there [at Automate] and extrapolating that doesn’t make sense. This is a fundamentally different architecture where we have about a third less components per actuator, it takes about a third of the assembly time.”
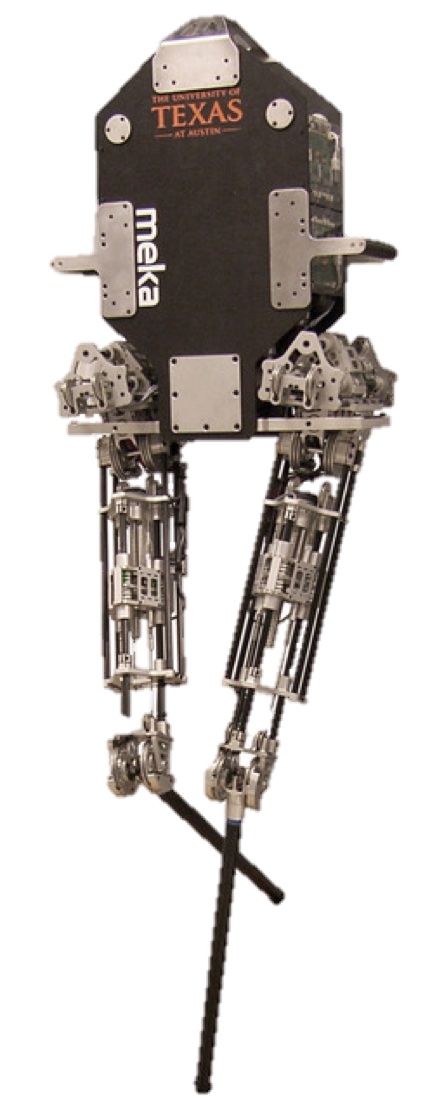
Image Credits: Apptronik
For a number of reasons, logistics is a logical place for a company like Apptronik to land. Not everyone wants to be sustained by government contracts forever. Over the last several years, logistics/fulfillment has come into its own as the hottest category in the robotics space. Like countless other companies that have pivoted from research to the world of commercial products, the company has had to determine whether the right market fit existed for the technology it was creating.
“The goal was to get to the humanoid,” says Cardenas. “The humanoid is kind of the holy grail. Probably the only thing that was consistent when we started was, ‘Don’t do humanoids. They’re too complicated.’ ”
The true value of humanoid robots in the workplace is still very much an open question. But at the very least, Apptronik isn’t the only one asking it. Tesla’s much-publicized Optimus announcement shook something loose. Suddenly the companies that had been operating in stealth mode felt compelled to announce their own intentions. Startups like 1X and Figure have discussed their progress to different extents. Sanctuary AI, which has partnered with Apptronik hardware, has already begun piloting systems.
Apptronik, for its part, has thus far shown off two halves of a robot. There’s Astra, the upper body of a humanoid robot, which can be mounted to an autonomous mobile robot (AMR). On the other end is Draco, which is quite literally all legs. The company refers to it as its “first biped” which is true — but that’s really all there is.
Part of our impromptu slide show are videos of the slender legs walking around the Apptronik labs. It’s hasn’t achieved Cassie speeds from the look of it, but from purely eyeballing it, the gait appears faster than what Tesla showed off in its recent Optimus videos. What becomes clear after looking at a handful of these seemingly disparate projects is that Apptronik has been building its own full humanoid robot piece by piece since the beginning.

Image Credits: Apptronik
Cardenas says the company bootstrapped for much of its existence, until hitting around 40-50 people. It will be exploring a Series A this year, following the official unveiling of its full humanoid system this summer. “We have all of these building blocks,” he adds. “A lot of it has been iterating and trying new ideas. The advantage to bootstrapping is we’ve believed in this for a long time. We’ve been at this now for about a decade as a team, from Valkyrie.”
At the moment, the company is working on walking and building out the robot’s core functionality prior to launch. It understandably wants to demonstrate that the product actually functions as planned prior to showing it to the world. It’s a markedly different approach to what Tesla has been doing with Optimus, and if everything goes according to plan, it will propel the firm to its next major raise.
Cardenas shows me images — both renders and photos — of Apollo, the system it plans to debut this summer. I can’t share them here, but I can tell you that the design bucks the kind of convergent evolution I’ve described, which found Tesla, Figure and OpenAI-backed 1X showing renders with a shared designed language. Apollo looks — in a word — friendlier than any of these systems and the NASA Valkyrie robot that came before it.
It shares a lot more design qualities with Astra. In fact, I might even go so far as describing it as a cartoony aesthetic, with a head shaped like an old-school iMac, and a combination of button eyes and display that comprise the face. While it’s true that most people won’t interact with these systems, which are designed to operate in places like warehouses and factory floors, it’s not necessary to embrace ominousness for the sake of looking cool.
In some ways, the general-purpose part is harder than the humanoid bit. That’s not to say that building a fully mobile and articulate bipedal robot is easy by any stretch of the imagination, but there’s a big chasm between special and general purpose. The precise definition of the latter is a conversation for another day, but for many, the label describes a system that is fully adaptable on the fly. For some, that means something like an API and app store for third-party developers to create skills, but the systems still have to adapt to their surroundings. Ideally, it’s a machine that can do any task a human can.
Too often, people fail to recognize the vast middle ground that is multi-purpose systems. For the time being, this is a much more pragmatic place to operate within. The Tesla notion of a robot that can work in the factory all day, do your grocery shopping and come home and cook you dinner feeds into existing outlandish expectations that have been fueled by decades of science fiction.
“To get it to do multiple things,” Cardenas says, “it’s still early days, but there are enough applications where if we can do simple things like move a box from point a to point b, there are tens of thousands of units’ worth of demands for those applications.”
Like all work in the space, these conversations require the caveat that we’re still in the extremely early stages. Agility has arguably come furthest in terms of proving out the efficacy of a humanoid (or at very least bipedal) robot in a warehouse setting. But even they have a long way to go.
Regardless, the next few years will offer some fascinating insight into where these culminations of decades worth of research are heading.
[ad_2]
Source link